В корзине пусто!
8 (495) 508 64 80 8 (800) 100 80 25
ПН - ПТ: 10:00 - 18:00, СБ: 11:00 - 17:00 (по Москве)


Контроллер — это узел, который определяет, как работает бесщёточный двигатель: насколько плавно он разгоняется, какой крутящий момент выдаёт и выдержит ли нагрузку в реальных условиях. В обиходе контроллер ещё называют “блоком управления плавным ходом”, “инвертор” - но эти определения не верны.
Почему контроллер — ключевой элемент системы.
В электротранспорте контроллер работает не в «идеальных условиях», а под постоянной нагрузкой: резкие разгоны подъёмы перегрузки просадки напряжения Если он подобран неправильно, система либо не раскрывает мощность, либо начинает перегреваться и терять стабильность. Как работает контроллер BLDC Контроллер управляет подачей тока на фазы двигателя через ШИМ (PWM), формируя вращающееся магнитное поле. Современные алгоритмы управления — FOC и SVPWM — позволяют: добиться плавного разгона снизить нагрев повысить КПД стабилизировать работу под переменной нагрузкой Это особенно важно для транспорта, где режим работы постоянно меняется.
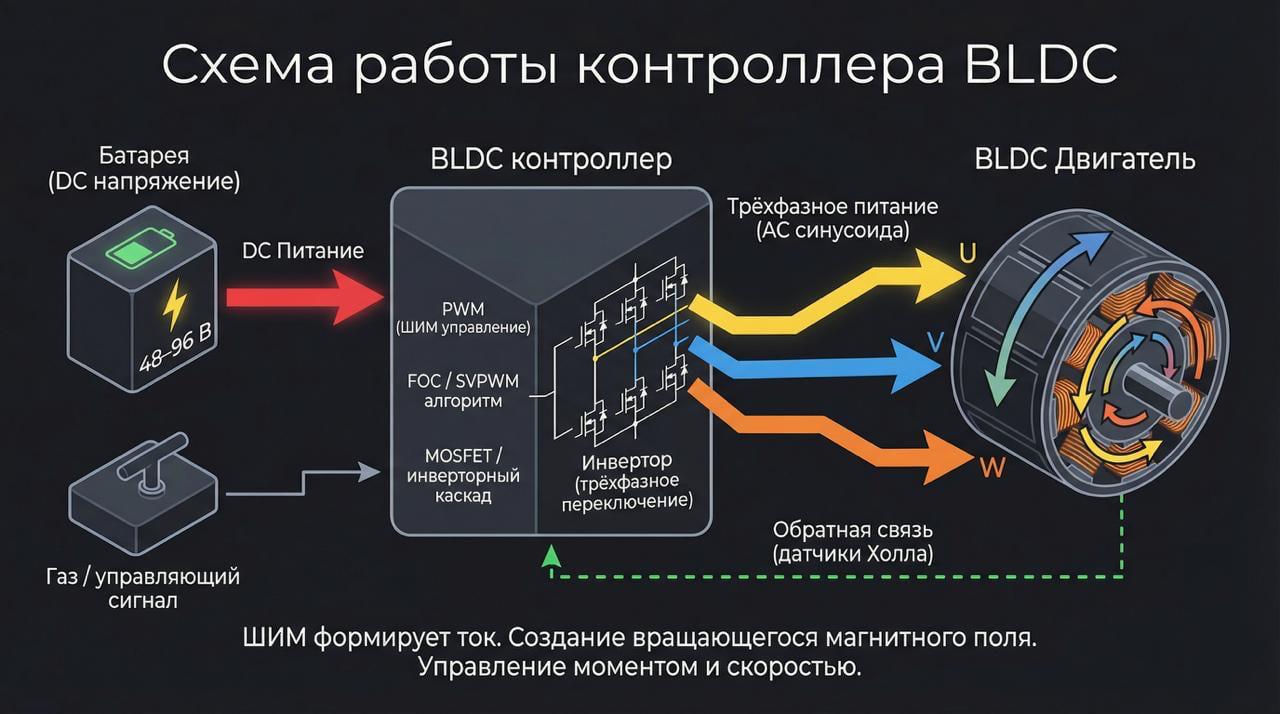
Cхема работы контроллера BLDC
Виды контроллеров: что реально влияет на выбор С практической точки зрения ключевыми являются два параметра.
Первый — тип управления. Трапецеидальные контроллеры проще, но дают пульсации момента и шум. Синусные (FOC / SVPWM) обеспечивают плавность, меньший нагрев и более высокий ресурс.
Второй — наличие датчиков. Контроллеры с датчиками Холла стабильнее на старте и при низких оборотах. Sensorless-решения проще, но хуже ведут себя под нагрузкой. Для электротранспорта чаще всего используются синусные контроллеры с датчиками. '
Как выбрать контроллер:
логика, которая работает Выбор всегда начинается с трёх параметров: напряжение, ток и алгоритм управления. Напряжение должно соответствовать батарее. В транспорте это чаще всего диапазон от 48 до 144 В. Ток — ключевой параметр. Важно учитывать не только номинальное значение, но и пиковые нагрузки, возникающие при разгоне и под нагрузкой. Именно ток определяет, сможет ли система реализовать свою мощность. Тип управления влияет на поведение двигателя — плавность, шум, эффективность и нагрев.
Дополнительно имеет значение наличие:
Типовые параметры выбора (сводка)
Электровелосипеды обычно используют системы 36–48 В с токами порядка 20–50 А и синусным управлением, где важна энергоэффективность и плавность.
Самокаты и скутеры работают в диапазоне 48–72 В с токами 50–150 А — здесь важен баланс мощности и ресурса.
Электробагги и мотоциклы требуют уже 72–144 В и токов 200–600 А, с использованием SVPWM и расчётом на пиковые нагрузки.
DIY-проекты могут попадать в любой диапазон, но ключевым фактором становится возможность настройки и универсальность контроллера.
Синусное и трапецеидальное управление: ключевые отличия
Разница между этими типами управления — в способе подачи тока на фазы двигателя, что напрямую влияет на поведение системы.
Трапецеидальное управление подаёт ток ступенчато: это проще и дешевле, но вызывает шум, пульсации момента и повышенный нагрев. Под нагрузкой такие контроллеры быстрее теряют стабильность.
Синусное управление (FOC / SVPWM) формирует плавную подачу тока, за счёт чего двигатель работает мягче, тише и эффективнее, лучше выдерживая переменные нагрузки.
На практике: трапецеидальные контроллеры — для простых задач, синусные — стандарт для электротранспорта. Разница особенно заметна на старте, низких оборотах и под нагрузкой — именно здесь проявляются ограничения дешёвых решений.

Различие синусного и трапецеидального управления
Реальный кейс: электро багги ~10 кВт
С практической точки зрения ключевыми являются два параметра. Первый — тип управления. Трапецеидальные контроллеры проще, но дают пульсации момента и шум. Синусные (FOC / SVPWM) обеспечивают плавность, меньший нагрев и более высокий ресурс. Второй — наличие датчиков. Контроллеры с датчиками Холла стабильнее на старте и при низких оборотах. Sensorless-решения проще, но хуже ведут себя под нагрузкой. Для электротранспорта чаще всего используются синусные контроллеры с датчиками.
Как выбрать контроллер: логика, которая работает
Один из показательных сценариев — электрическое багги мощностью около 10 кВт.
Исходные параметры:
В таких условиях дешевые контроллеры начинают перегреваться, теряют стабильность и не выдерживают пиковые токи.
Решение — использование контроллера с запасом по току (300–500 А и выше), поддержкой FOC и защитами.
Это позволяет:
Частые ошибки при выборе
На практике чаще всего встречаются одни и те же проблемы. Контроллер выбирается по мощности, а не по току — в результате он не справляется с нагрузкой. Игнорируются пиковые значения, и система становится нестабильной.
Также часто выбирается неподходящий тип управления или не учитываются условия охлаждения. Эти ошибки не очевидны при покупке, но почти всегда проявляются в эксплуатации.
Когда имеет смысл использовать контроллеры Kelly
Контроллеры Kelly применяются там, где стандартные решения уже не дают нужного результата.Это актуально для электротранспорта, где важны:
Такие контроллеры используются в проектах, где требуется надёжность и управляемость, а не просто базовая функциональность.
Примеры контроллеров Kelly
Синусные контроллеры KLS для безщёточных моторов (24В-144В)
Контроллер для мощных систем с напряжением до 144 В и токами до 400–600 А. Подходит для электро багги, электромобилей и промышленного транспорта. https://kellycontroller.ru/sinusoidal-wave-brushless-motor-controller-kls-24v-144v/
Синусный контроллер для безщёточного мотора KLS7230S, 24V-72V, 300A
Решение для проектов среднего уровня, где требуется баланс между мощностью и стабильностью работы.
Безщёточные контроллеры KHB (144V)
https://kellycontroller.ru/general-brushless-controllers-12v-144v/144v-brushless-khb-controller/
Контроллер для высоковольтных систем с длительной работой под нагрузкой.
Часто задаваемые вопросы о контроллерах для бесщеточных двигателей
Какой контроллер выбрать для бесщеточного двигателя?
Выбор зависит не от «мощности», а от трёх параметров: напряжения батареи, тока и типа управления. Для электротранспорта обычно выбирают синусные контроллеры (FOC или SVPWM), так как они обеспечивают плавность и стабильную работу под нагрузкой. Контроллер бесщеточного двигателя — это элемент, который определяет поведение всей системы. Если выбирать его формально, ориентируясь только на цену или мощность, система почти неизбежно столкнётся с проблемами. Если же учитывать реальные параметры — напряжение, ток, режим работы и условия эксплуатации — можно получить стабильную и эффективную работу даже в сложных проектах электротранспорта.
Можно ли поставить более мощный контроллер, чем требуется?
Да, и это часто правильное решение. Контроллер с запасом по току работает стабильнее, меньше нагревается и лучше переносит пиковые нагрузки. Главное — чтобы он корректно настраивался под двигатель.
Что важнее — мощность или ток контроллера?
Ток. Именно ток определяет, сможет ли контроллер выдерживать реальные нагрузки при разгоне и работе под нагрузкой. Ориентация только на мощность — одна из самых частых ошибок.
Чем отличается синусный контроллер от обычного?
Синусный (FOC / SVPWM) контроллер управляет двигателем более плавно, снижает шум, вибрации и нагрев. Трапецеидальные контроллеры проще и дешевле, но хуже подходят для электротранспорта.
Нужны ли датчики Холла в контроллере?
Если важен стабильный запуск и работа на низких оборотах — да. Sensorless-контроллеры проще, но хуже работают при старте и под высокой нагрузкой.
Какой контроллер нужен для электровелосипеда?
Обычно это 36–48 В и ток до 50 А. Важно выбирать синусный контроллер с хорошей настройкой — это влияет на плавность и эффективность.
Какой контроллер нужен для электро багги или мощного транспорта?
В таких проектах используются контроллеры 72–144 В с токами 200–600 А. Обязательны поддержка FOC, защита от перегрузок и возможность настройки параметров.
Зачем нужна настройка контроллера?
Настройка позволяет адаптировать контроллер под конкретный двигатель и условия эксплуатации. Без этого возможны рывки, перегрев или потеря эффективности.
Что такое рекуперация в контроллере?
Это режим, при котором энергия торможения возвращается обратно в батарею. Он повышает эффективность и снижает износ тормозной системы.